-
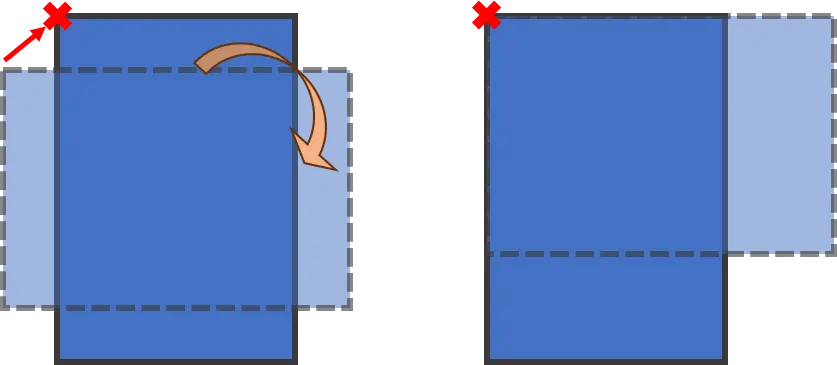
Halcon有分別提供鏡射(mirror_image)及旋轉(rotate_image)的方法,但如果考慮效能及時間,透過齊次座標(Homogeneous Coordinate)一次將影像轉換是最有效…
-
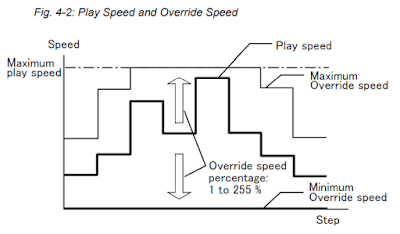
如何利用外部IO(8點)控制安川手臂路徑的整體速度?How to set override speed by external IO for Yaskawa Robot?安川手臂可透過將8個實體I/O…
-
最近在寫多執行緒的功能有需要用到物件池(object pool)的架構,最簡單的想法是用List搭配LINQ解決。但偶爾會報”集合已修改; 列舉作業可能尚未執行”,有個簡單的解決方法是在foreach…
-
Halcon與C#開發如何正確釋放記憶體? How to release Halcon Object memory correctly in C#? 在整合時,會需要避免記憶體洩漏的問題,如果影像沒有…