-
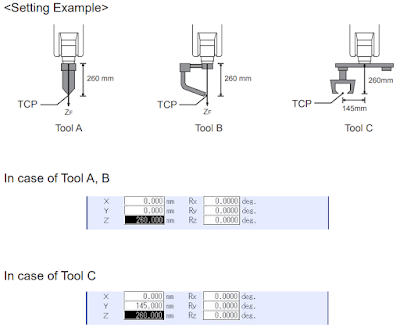
安川機械手臂工具設定 Yaskawa Robot Tool Data Setting. 安川手臂可以設定工具的座標,讓手臂可以依照使用者設計的工具計算手臂姿態。比如手臂末端裝了一組夾爪讓Z軸向下100…
-
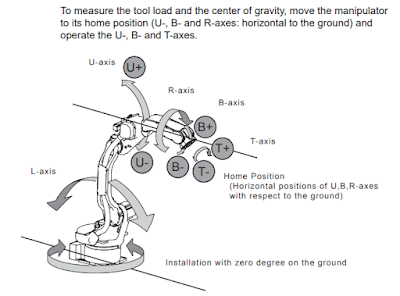
安川手臂有提供自動量測手臂工具負載及重心的功能,在沒辦法準確給予工具的重心及慣量參數的狀況,這功能非常好用。畢竟有時候機構圖上算出來跟實際加工出來還是有些許落差。
-
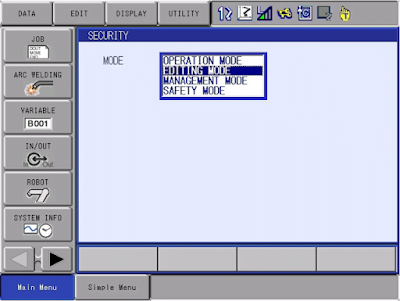
安川手臂控制器有四種安全等級來分類功能,下圖是各種模式的介紹。
-
第一次使用安川手臂的時候,對於這兩者的差異不了解,多方請教後,才知道這兩者的用途完全不同,如果隨便設定可是會影響手臂運作的。
-
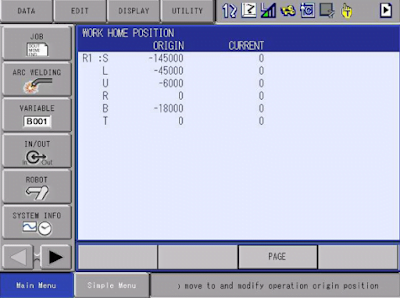
手臂的作業原點主要在定義手臂的作業起始點,可以幫助工程師在使用手臂時可以快速復歸。在端子台上也有作業原點訊號輸出(Work Home Position [30022]),當手臂接近作業原點時會亮起,非…
-
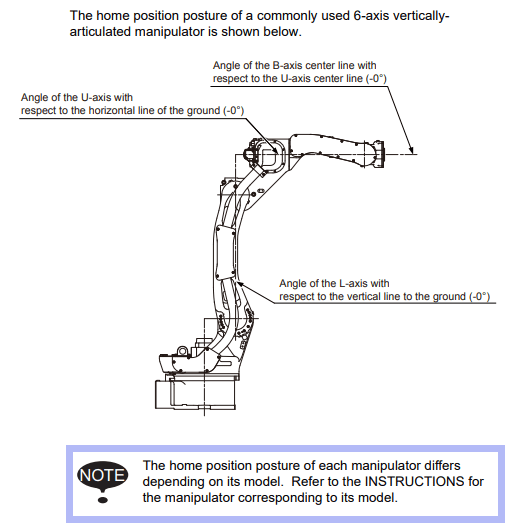
第二原點位置會參考原點位置(Home Position),當手臂在第二原點位置時,此時手臂上各軸的箭頭會對齊,通常會呈現下圖的樣子,下臂會垂直朝上,上臂則會水平朝前,腕部的位置也會朝前。