相信接觸工業控制相關產業的朋友,相信對RS232、RS485都不陌生,即便問世多年,現今還是有很多控制設備都以此通訊為主,本篇會以工業自動化的角度來說明彼此之間的差異,或是一些常會搞混的名詞。
TIA通訊標準
RS232/RS485過去是由電子工業聯盟(EIA)管理,後來EIA結束後,現由美國電信產業協會(TIA)管理。
以RS232為例,正式名稱為TIA-232-C(前身為EIA-232-C),其中232表示標準編號,C表示是在1969年第三次修改,過去還有RS232B、RS232A。
最初以RS(Recommended Standard)代表推薦標準,雖然現已改為TIA管理,但業界還是多以RS232稱呼。
標準定義
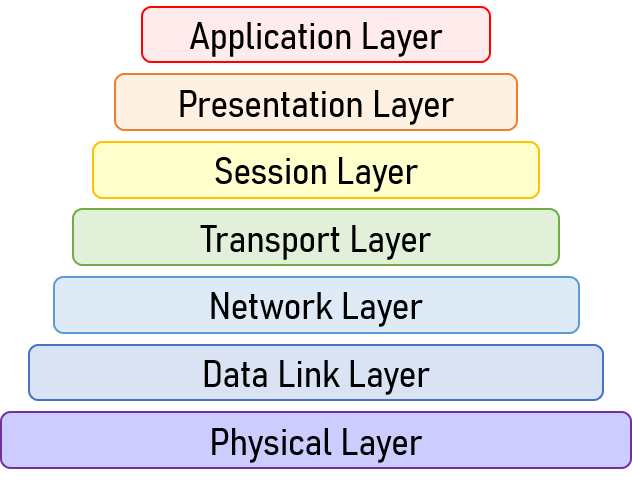
這兩種標準皆只有定義實體層(Physical Layer),並沒有定義任何的通訊協議。
隨時代演進,目前RS232、RS485在工業相關設備大多使用通用非同步收發傳輸器(UART)的方式傳遞資料,只需要連接Rx、Tx、GND,下面的篇幅也會加上UART標準來比較。
通用非同步收發傳輸器(UART)
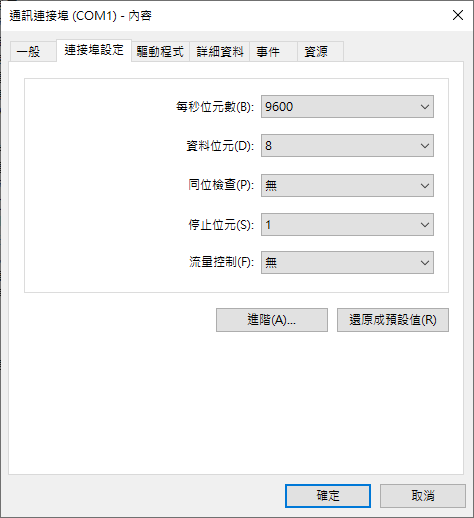
先來說說UART(Universal Asynchronous Receiver/Transmitter),將資料通過串列通訊進行傳輸。因為接線上沒有定義Clock需要設定Baud Rate來定義資料取樣時間。
目前這兩種標準多以此方式傳遞,簡單的設備會自定義封包格式(ascii、bytes),高階設備則會用Modbus標準。

RS232
在電腦上為常見的Comport,可全雙工方式運作,可以同時收發資料,缺點是只能一對一通訊,也因為是單端(Single-Ended)訊號,抗干擾能力不高,高速下最長距離只有15M。
過去的主機板會配置RS232,現則多被USB取代。工業電腦上仍保有該設計,例如光源控制器、或是一些簡單的感測器。參見:RS232接線方式
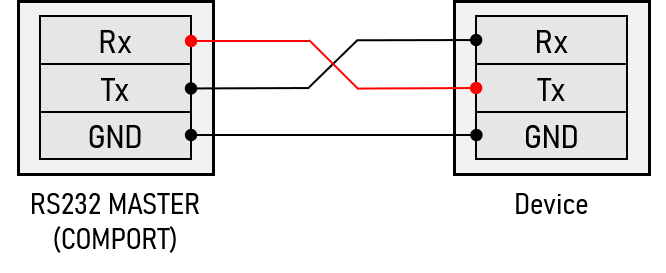
或許你曾在其他地方看過9Pin(甚至25pin)中有其他定義,是因為早期modem、印表機是透過RS232通訊,所以有定義RTS、CTS…等腳位去做硬體狀態確認。隨時代演進至今,大多電腦周邊設備已經轉去支援USB、WiFi,目前大多剩工業相關設備還有使用,因此只需要接Rx、Tx即可。
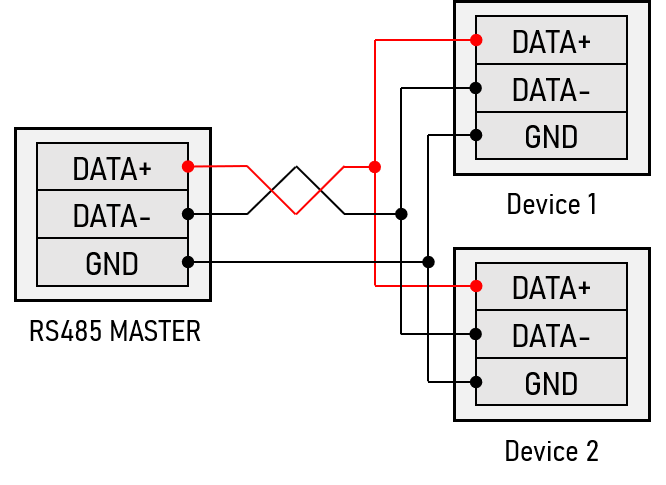
RS485
以差動(Differential)方式連接,半雙工方式運作,由主控端(Master)控制資料的收發時機,可以一對多通訊(最多32點)。
在實際應用上,因設備或線路的阻抗特性組合問題,當阻抗不匹配時可能會發生通訊中斷,因此需要在最末端的加上終端電阻(通常為120Ω歐姆)。自身經驗是台達DMC-NET串多站設備時需要。參見:RS485接線方式
另外有很多工業自動化的總線控制標準是建立在RS485標準上,再定義自家的通訊格式,例如西門子的PROFIBUS、台達的DMC-NET、Motionnet…等。而近年逐漸被TCP/IP衍生的工業標準EtherCAT取代又是另一則故事。
標準比較
| RS232 | RS485 | |
|---|---|---|
| 工作模式 | 全雙工 | 半雙工 |
| 傳輸距離(理論值) | ~15m | ~1200m |
| 通訊方式 | 單端 | 差動 |
| 抗干擾能力 | 低 | 高 |
| 電壓準位 | +/-5 to +/-15v | +/-1.5V |
參考資料
- FTDI Chip: Waht is a UART? (Technical Note 111)
- RS232 UART 的差別-最原始的通訊介面原來長這樣
- 淺談USB介面轉換RS232,RS422,RS485的技術應用
- RS-485标准和OSI系统模型通信层详解
發佈留言