-

如果要透過批次檔、排程方式將Windows關機或重新啟動,可以使用Windows的關機程式(shutdown. […]
-
當在Windows執行batch檔(.bat)時,執行完作業視窗閃一下就自動關閉了,執行的結果是什麼完全看不到 […]
-
安川手臂可透過網路通訊協定控制,例如讀取手臂目前位置或是讀寫手臂狀態、I/O、警報…等參數資訊、讀 […]
-
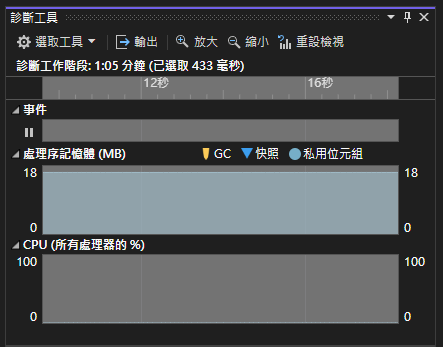
寫影像處理程式時,可能會一次性處理大量的影像資料,或是用相機做即時視覺檢測,要在完成任務後需要手動將資源釋放, […]
-
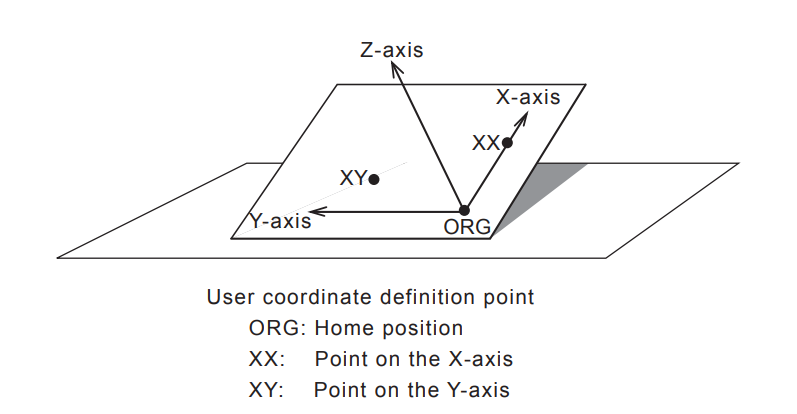
定義手臂工作區域的坐標原點,也就是對各工作站定義各自的坐標,可以大大簡化後續教導路徑的複雜度。
-
強大的C#字串處理上提供非常實用的功能,如果要限制數值類型(int, double, etc.)轉成字串時有特 […]