前言
在使用機械手臂工作時,坐標系的定義非常重要,瞭解手臂各種座標的應用及彼此之間的關係,可以事半功倍。
使用者座標(User Coordinates),又稱工件座標、工作座標。各家廠商名詞可能有不所同,與手臂工具(Tool)是兩個完全不同的概念,第一次接觸容易搞混,本篇名詞會以使用者座標為主。安川手臂工具校正可以參考這篇。
使用者座標
介紹
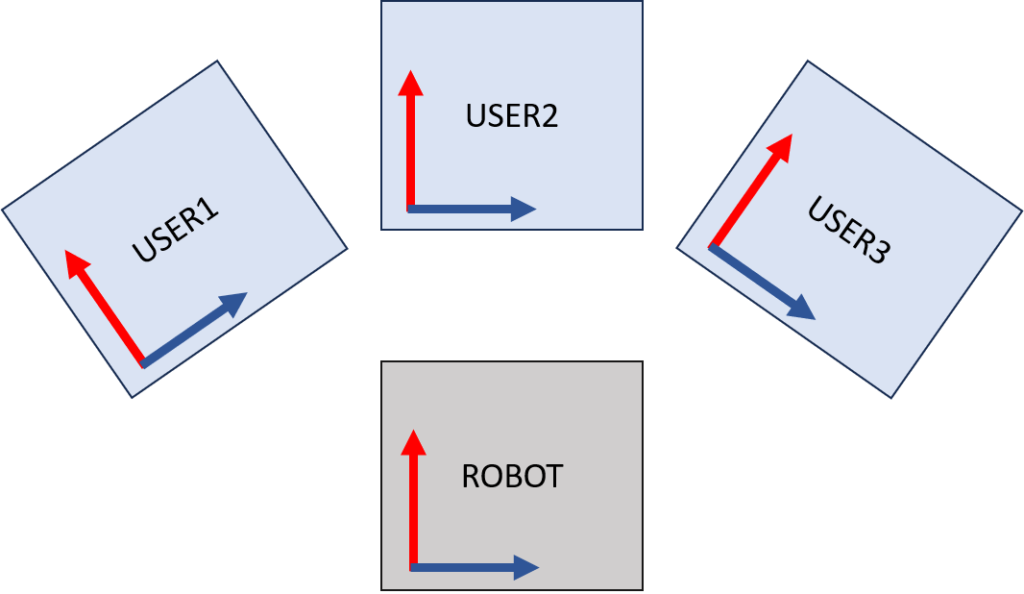
主要是用於定義手臂工作區域的坐標原點,也就是對各工作站定義各自的坐標,而不是倚賴手臂自身的坐標系,可以大大簡化後續教導路徑的複雜度。
例如在應用上可能會遇到多個相同工作區,可以透過切換使用者座標來變換工作區,而不需要再重複教導路徑;或是在輸送帶上連續加工時,可透過接入編碼器訊號即時偏移使用者座標,做到手臂跟隨輸送帶加工。
說明
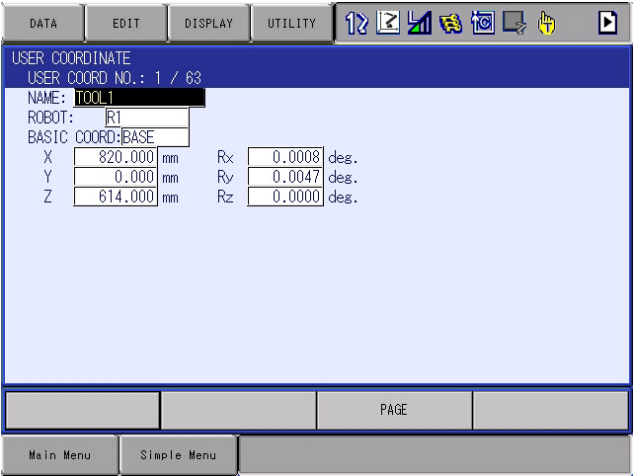
安川手臂提供63組使用者座標欄位,使用者座標以BASE(關節Joint)為主。
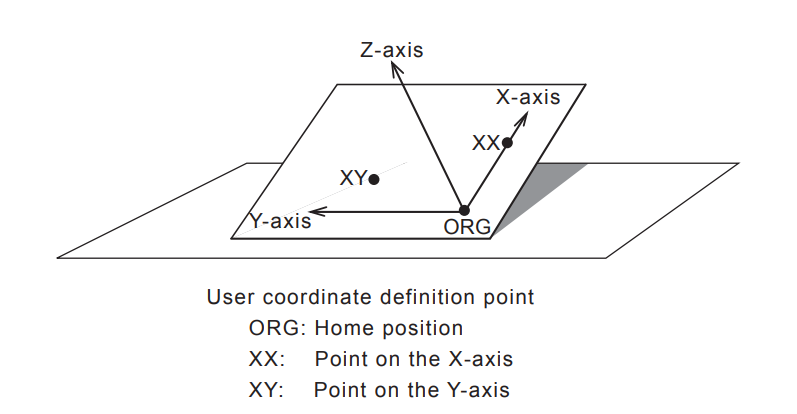
透過三點(ORG、XX、XY)定義出使用者座標的平面,以ORG、XX先在空間中固定X軸,再用XY定出Y軸、Z軸,因此ORG、XX這兩點會高度影響座標系的精確度。
另外有個小訣竅,安川的坐標系可以用右手定則表示,對應食指(X)、中指(Y)、拇指(Z)。
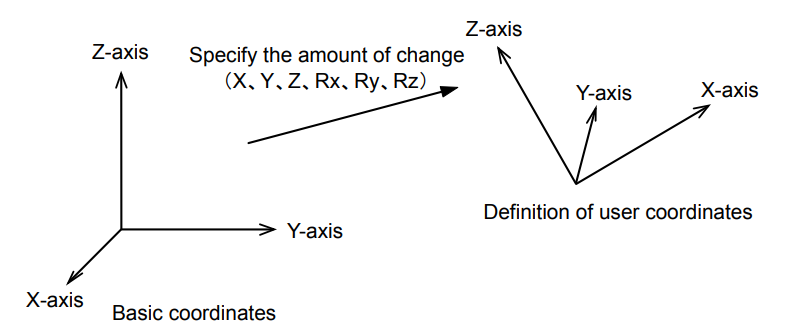
另一種方式是參考某個使用者座標,再偏移出第二使用者座標。
設定步驟
Step1
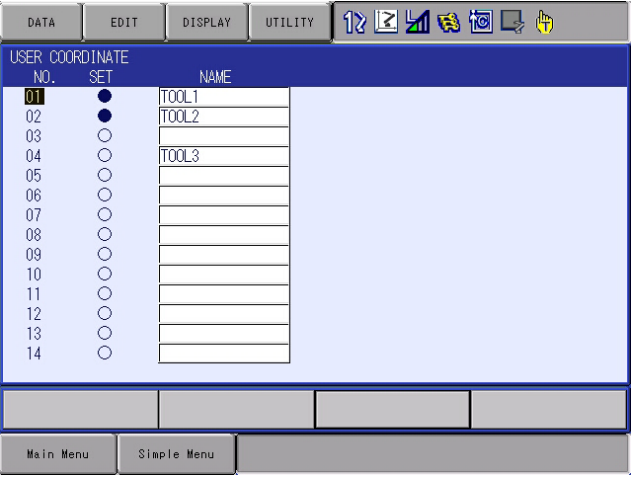
點選[Robot]→[User Coordinate],進入使用者座標設定頁。
*SET燈號亮起表示此座標有完成設定。
Step2
按下[Select]進入設定頁面。
根據上個段落的方法,選擇ORG,並移動手臂到目標位置
按下[Modify]→[Enter]寫入,繼續以相同步驟完成XX、XY直到狀態燈都亮起。
*如果需要重新檢視校正點位置,可以選擇對應點(OGR、XX、XY),按下[FWD]。手臂會移動到該點。
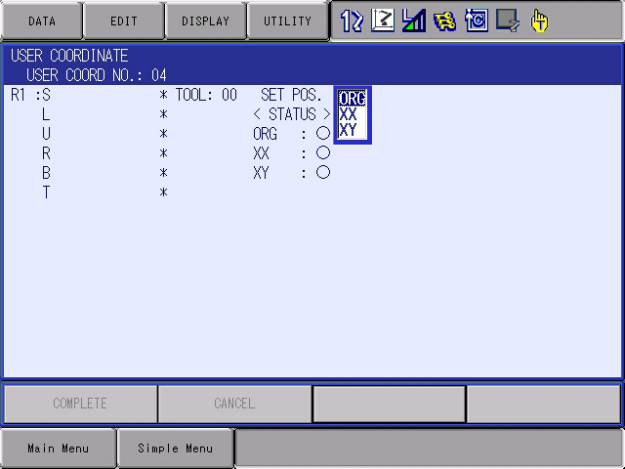
Step3
完成設定後按下左下角[Complete]。
檢視設定資料&參考其他座標偏移
點上方[Display]→[Coordinate Data],檢視座標設定資料。
BASIC COORD表示座標的基準來源,可用於參考其他使用者座標做出偏移。
以上為工作過程的問題紀錄
如果步驟有誤,還請先進前輩不吝指教。
參考資料
- YRC1000 INSTRUCTIONS Ch8.8 (使用者座標設定)
- YRC1000 GENERAL OPERATOR’S MANUAL Ch2.3.5 (使用者座標切換)
- 美國安川電機官網